

2019 jun 28
The PASSARO project of Clean Sky 2 ITD-Airframe, in collaboration with Airbus Defence and Space (ADS) has as one of its objectives and contributions to the ITD AIR, to research and develop the concept of collaborative robots’ approach to composites manufacturing. This activity in the project was led by OPTIMAL which main goal was to develop a practical and cost-effective automated solution to replace traditional hand lay-up, using qualified materials.
 Traditionally, composite pre-preg components manufacture is essentially a handmade activity, but steps are being taken towards its automation. During the past decade, several automated lay-up solutions have emerged for relatively simple geometry parts. These solutions are often quite expensive, and commonly demand factories to be designed from scratch for their installation. As an alternative, collaborative robot could be integrated on the existing manufacturing workflows, in order to bring automation to some tasks and improve productivity. This solution could be integrated without drastically changing the surrounding environment. Industrial robots are fast, strong and have an exceptional accuracy and repeatability, but they are developed aiming only the optimization of the final result.
Traditionally, composite pre-preg components manufacture is essentially a handmade activity, but steps are being taken towards its automation. During the past decade, several automated lay-up solutions have emerged for relatively simple geometry parts. These solutions are often quite expensive, and commonly demand factories to be designed from scratch for their installation. As an alternative, collaborative robot could be integrated on the existing manufacturing workflows, in order to bring automation to some tasks and improve productivity. This solution could be integrated without drastically changing the surrounding environment. Industrial robots are fast, strong and have an exceptional accuracy and repeatability, but they are developed aiming only the optimization of the final result.
Within the PASSARO’s Work Package 10, three main steps were developed using the collaborative robot: ply pick-up and sorting, directly from the automated ply cutter; ply peeling using a dedicated cell, and; ply positioning and stacking in a tool. In order to implement these activities a cell was developed, which receives pre-preg plies from the ply cutter and automatically peels and stacks them on a mould.
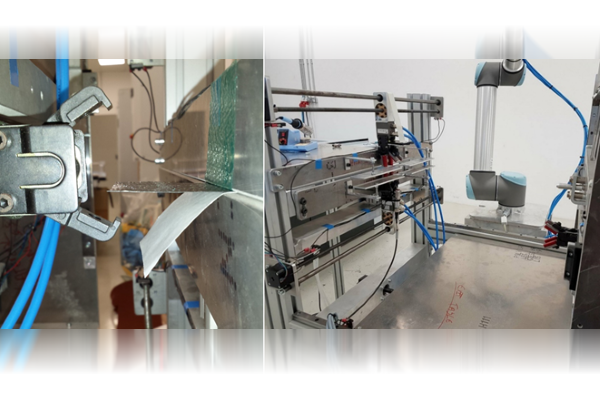
Positioning and stacking tasks are made by the robot arm and they are achieved through the use of special suctions cups for prepreg handling. The peeler is a more complex machine, which uses compressed air to peel the prepreg. These materials are protected by two coatings, usually one plastic and one paper, or simply by two plastics. The peeling concept is based on the fact that different materials tend to vibrate at different frequencies when the same stimulus is applied. The different vibration frequencies helps the production of air pockets between the prepreg and the covering layers. The plate resonator adjusts the vibration amplitude for different materials. This prototype could achieve peeling rates of success near 100% for specific materials and a stacking accuracy of ± 0.5 mm, in each of the two degrees of freedom in plane of the mould, and ± 0.1ş in rotation.
The modular approach adopted for this system makes it not dependant on plies dimensions. The width is covered by adding more parallel peeling modules and the length by adjusting the peeler opening range. This technology, when compared with an operator, offers a clear improvement in process accuracy, repeatability and specially in cycle time, with reductions up to 70%.
Authors: António Reis, Nicole Cruz, Marco Neves (OPTIMAL) and Rúben Buelga Sanchez (ADS).